Edge Detection Robot

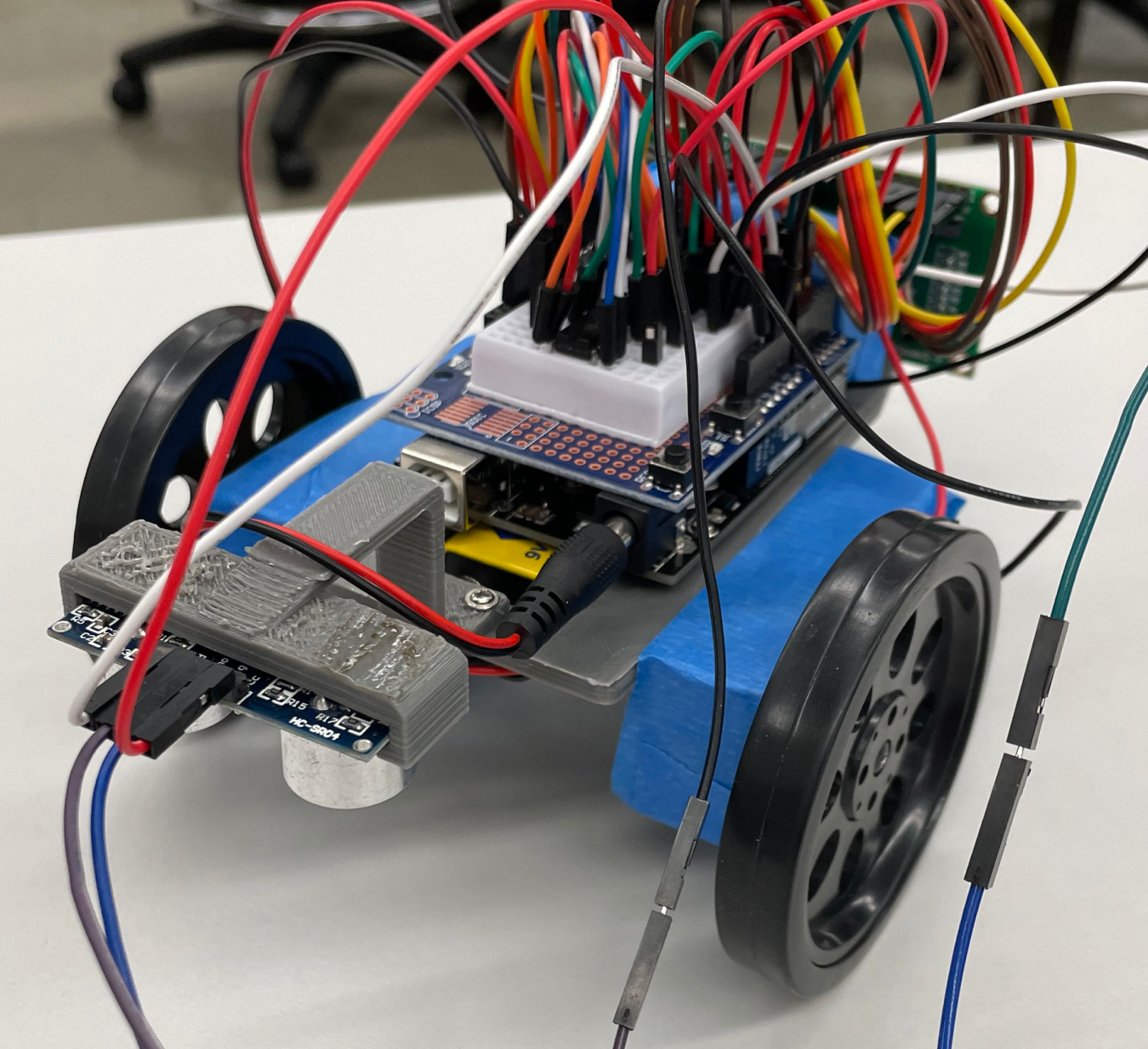
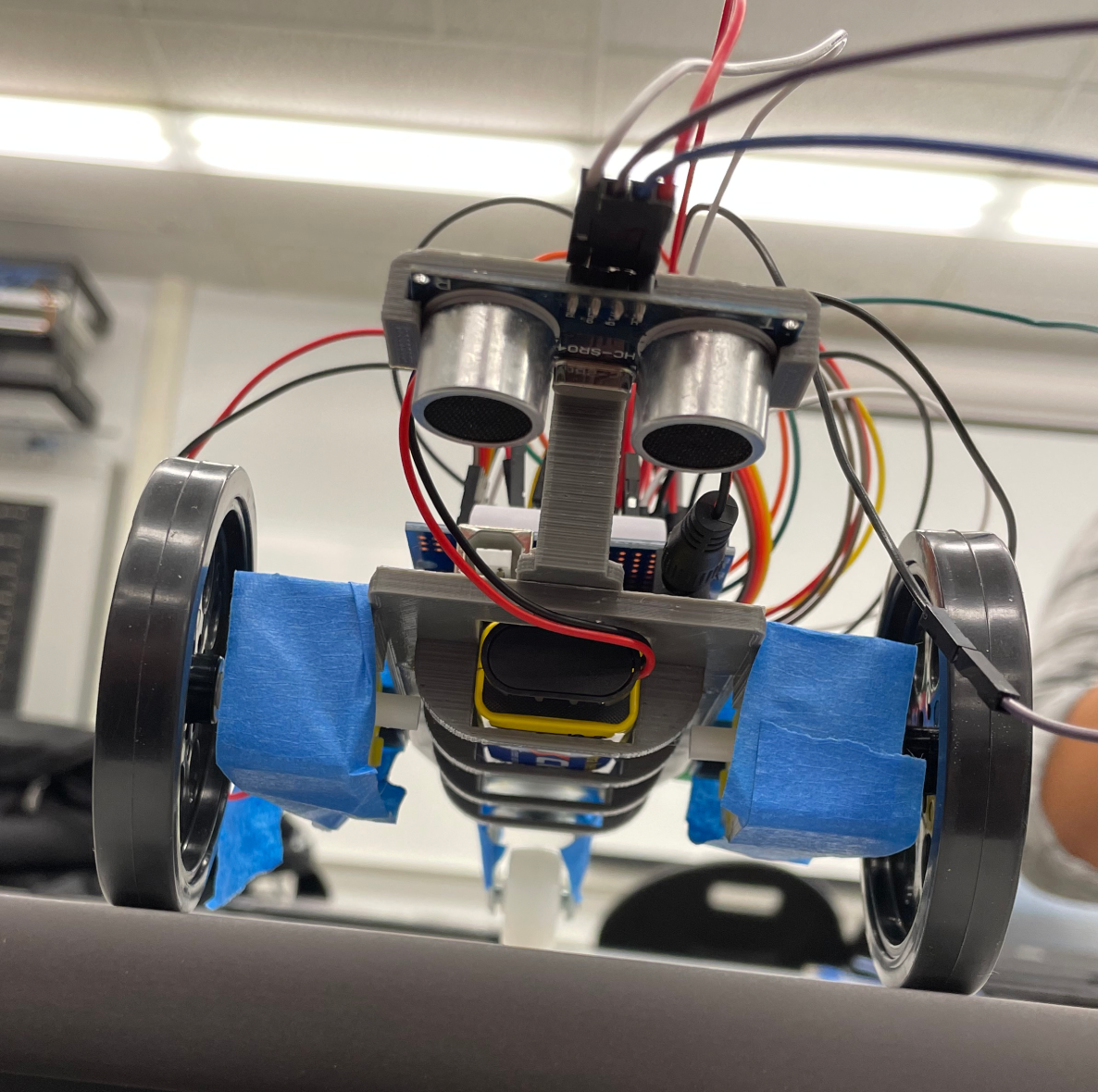
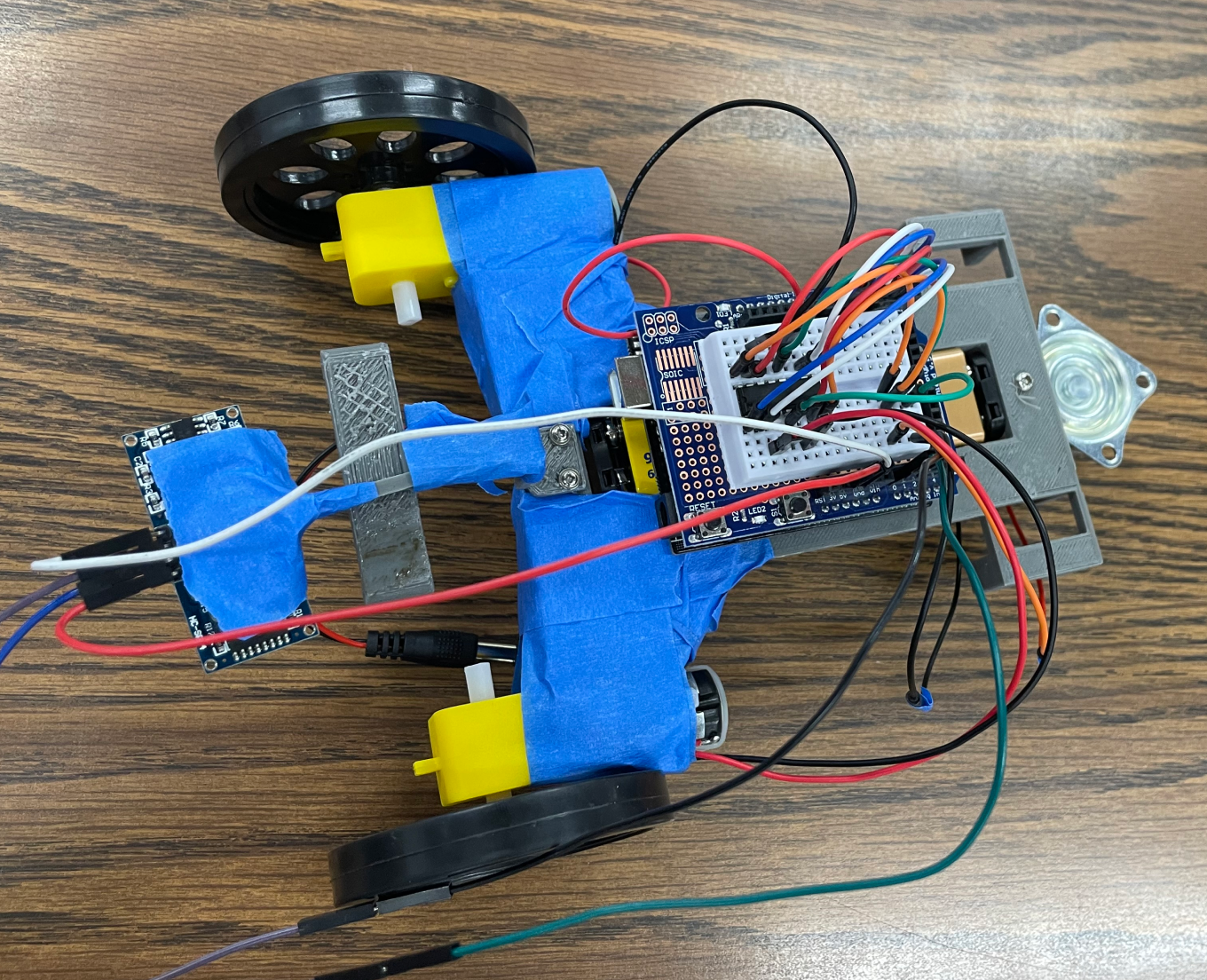
I worked on this robot in my Controls class with a group of peers seeking to better understand and create an autonomous vehicle system. Our project specifically is designed to detect and avoid the edges of a table as it wanders across it. It makes use of an ultrasonic sensor that signals the motors to stop when it encounters a gap. This is all coordinated through an Arduino UNO board.
On the robot I contributed by designing the 3D printed chassis and aiding with coding the arduino. I designed the chassis in SolidWorks and 3D printed it myself. For the Arduino, I learned how to code in the Arduino language, how to control electronic devices and fine tune them to suit a particular environment. This project helped me gain an insight into the challenges of enabling cars to drive autonomously and how a controls background can help achieve that.